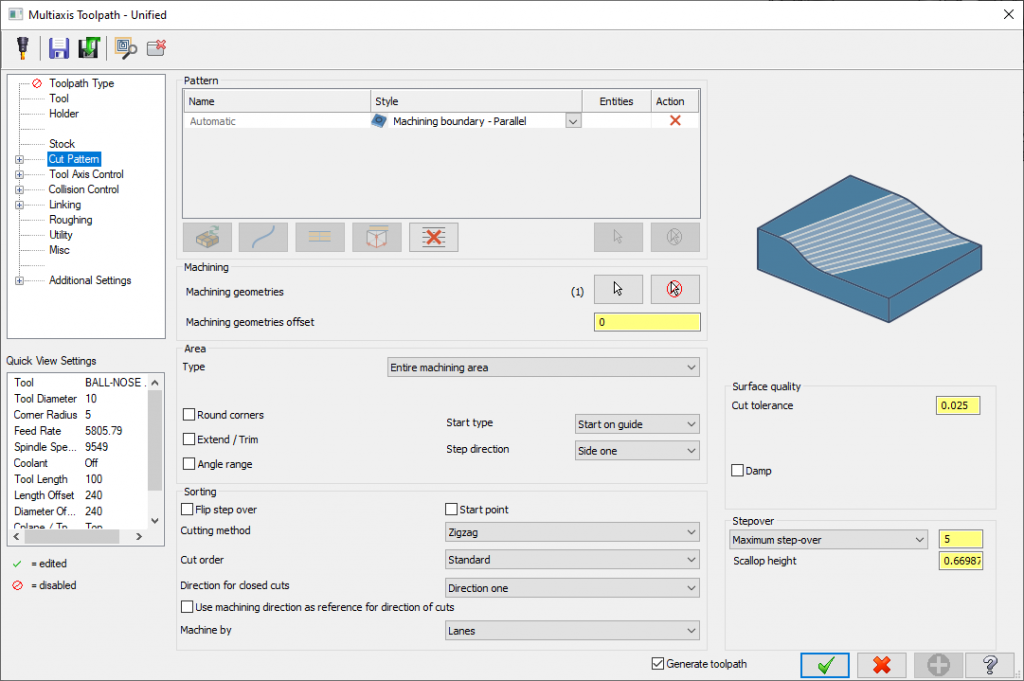
Unified ทางเดินมีดหลายแกนแบบใหม่ ทำให้คุณสามารถเลือกส่วนของชิ้นงานได้หลายชิ้นเพื่อสร้างรูปแบบทางเดินมีด จากนั้น ใช้ตัวเลือกชิ้นส่วนเหล่านั้น คำสั่งจะเลือกอัลกอริธึมที่ดีที่สุดในการคำนวณเส้นทาง ตัวอย่างคือการใช้เชนเพื่อสร้างรูปแบบการตัด หรือระหว่างสองพื้นผิวเพื่อที่จะสร้างทางเดินมีดที่ปรับรูปร่าง(morph)
เส้นทางเดินมีดเครื่องมือเดียวนี้ให้คุณเข้าถึงเส้นทางเครื่องมือตามพื้นผิวทั้งหมด (Morph, Parallel, Along Curve และ Project) รวมถึงตัวเลือกเส้นทางเครื่องมือ (อัตโนมัติ, เส้นบอกแนว) ในอินเทอร์เฟซเดียว
คุณสามารถเพิ่มหรือเอารูปแบบออกได้ เช่น การเปลี่ยนจากรูปแบบขนานเป็นรูปแบบเชนเป็น morph ระหว่างสองพื้นผิวโดยไม่ต้องเริ่มคำสั่งใหม่ เลือกรูปแบบการขับเคลื่อนสี่แบบ (แสดงด้านล่าง): อัตโนมัติ เส้น พื้นผิว ระนาบ รูปแบบเส้น พื้นผิว และระนาบคล้ายกับตัวเลือกในเส้นทางเครื่องมือแบบขนานหรือแบบมอร์ฟ เช่น ขนานกับเส้น มอร์ฟระหว่างเส้น ขนานกับพื้นผิว มอร์ฟระหว่างพื้นผิว หรือขนานกับระนาบ
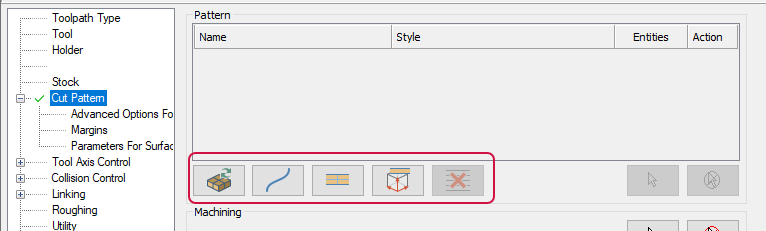
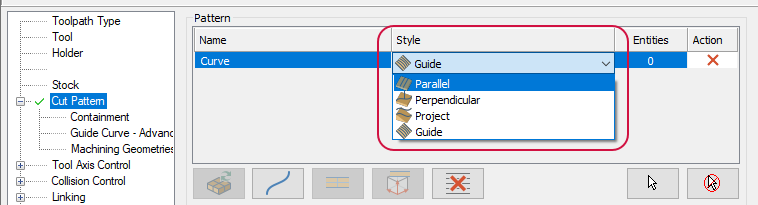
เมื่อคุณเลือกประเภทรูปแบบ รายการจะปรากฏในตารางรูปแบบ คุณสามารถมีรายการรูปแบบได้หลายรายการในตารางดังที่แสดงด้านล่าง คอลัมน์สไตล์คือดรอปดาวน์ที่มีตัวเลือกเพื่อใช้กับรูปแบบ
Unified เส้นทางเดินมีหลายแกนนั้นใช้อัลกอริธึม geodesic ใหม่เมื่อรูปแบบถูกตั้งค่าเป็นอัตโนมัติหรือเมื่อเส้นและพื้นผิว ถูกตั้งค่าเป็น Guide Geodesic ถูกกำหนดให้เป็นเส้นที่สั้นที่สุดระหว่างจุดสองจุดบนพื้นผิวโค้ง อัลกอริธึม geodesic ของ Mastercam กำจัดการผิดรูปที่คุณอาจได้รับเมื่อสร้างเส้นทางเครื่องมือเหนือพื้นผิวดังกล่าว
รูปแบบ geodesic Automatic ใช้ขอบเขตของเรขาคณิตที่คุณเลือกและพยายามค้นหาขอบเขต จากนั้นจะสร้างเส้นทางเครื่องมือที่ขนานกับขอบหรือเปลี่ยนรูปร่างระหว่างรูปร่างตรงกลางกับขอบตามสไตล์ที่คุณเลือก
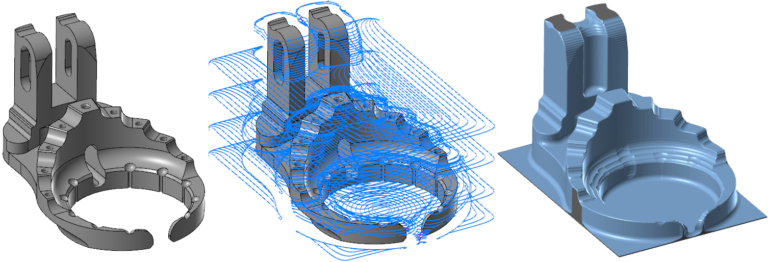
ด้านล่างนี้คือตัวอย่างบางส่วนของเส้นทางเครื่องมือ Unified Multiaxis
Parameters | Toolpath Result |
รูปแบบตั้งค่าเป็น Automatic.Style ตั้งค่าเป็นขอบเขตการกัด – ขนาน |  |
รูปแบบตั้งค่าเป็น Automatic.Style ตั้งค่าเป็น Center – Parallel |  |
รูปแบบตั้งค่าเป็น Automatic.Style ตั้งค่าเป็น Center – Parallel.Fill holes ที่เลือกในหน้า Machining Geometries – Advanced Parameters |  |
เข้าถึง Multiaxis Unified toolpath จากแกลเลอรี Multiaxis บนแท็บบริบทของ Mill Toolpaths